

Apollo 2: Faceplate Integration
Feb 2025 - Nov 2025
Harmonizing ID and CMF consistency with advanced IMD technology for seamless robotic expression
As the latest generation of our humanoid platform, Apollo 2 was officially unveiled to the public in June 2026, redefining human-robot interaction. Entering the project in March 2025 during the critical post-soft-lock phase, I navigated the complex transition where conceptual intent meets rigid engineering and budgetary realities. The core challenge centered on the faceplate: achieving a flawless, hidden-til-lit 'deadfront' LED mouth display while ensuring its surface color and finish seamlessly matched the surrounding head covers. To resolve this, I spearheaded a cross-functional pivot by introducing advanced IMD technology. By directly bridging the gaps between industrial design aspirations, mechanical tolerances, and tooling vendors, I established a robust production workflow that elevated the physical execution and delivered an uncompromising, premium final product.
Role
ID Lead
Contribution
Concept Development
Mouth HRI Study & Exploration
Industrial Design Refinement
Prototyping
Hardware UX
Color, Material and Finish
Design For Manufacture
The Challenges at Entry


Assessing the Prototype
Upon joining the Apollo 2 program, the primary architecture of the head was soft-locked, and initial physical evaluation began by trialing the new head assembly on the existing Apollo 1 chassis. This critical phase revealed a clear disconnect between the conceptual design intent and engineering execution, exposing major vulnerabilities across three core disciplines:
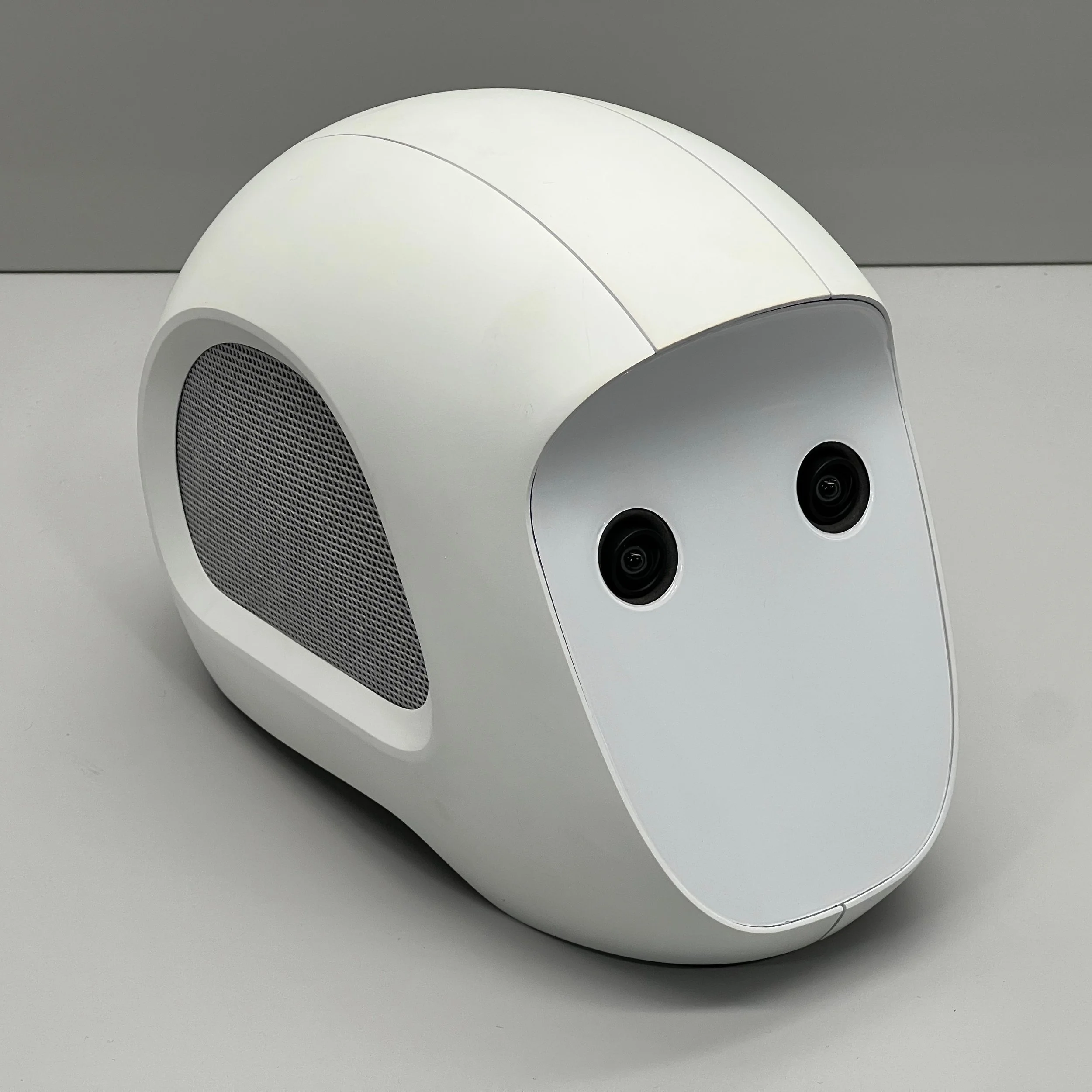
ID Discrepancy: The faceplate felt isolated from the overall head form. The visible gaps and parting lines where the faceplate met the main head covers lacked precision, disrupting the intended clean design of the head.
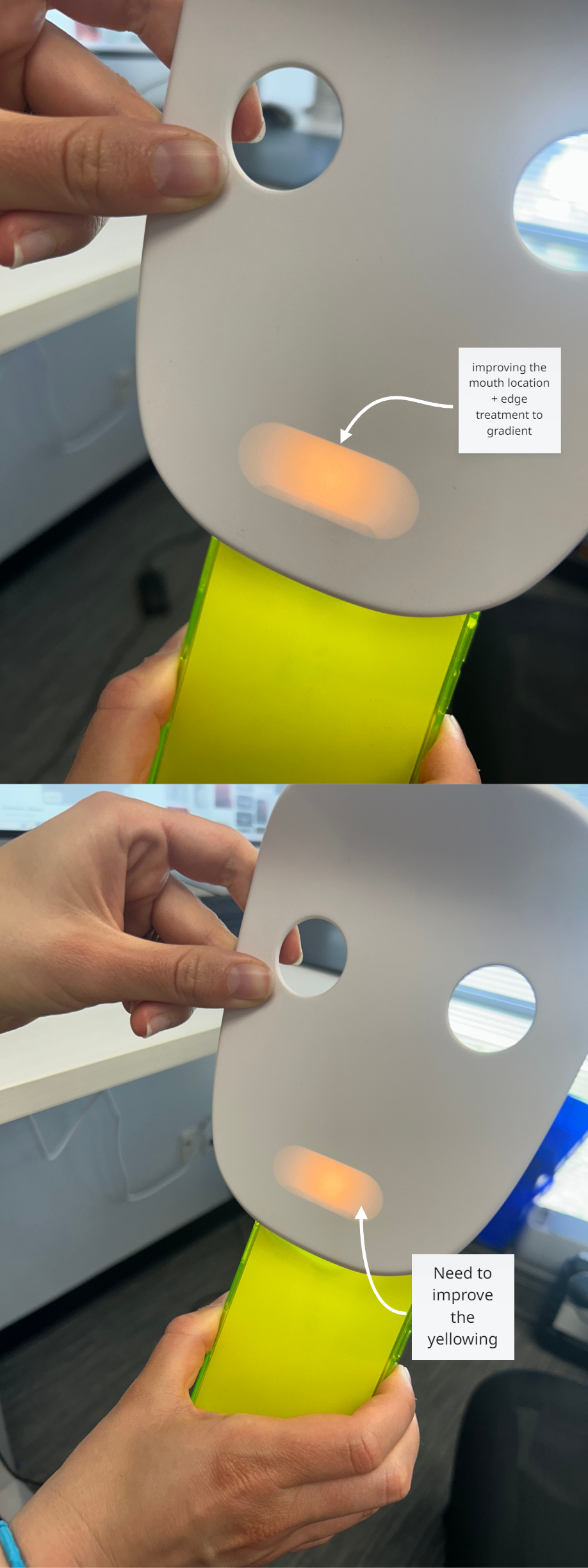
CMF Inconsistency: Initial attempts to achieve the "deadfront" LED mouth relied on a blended acrylic sheet with a rear vinyl film. This resulted in an immediate surface texture and gloss mismatch; the faceplate appeared as a cheap, tacked-on layer that failed to align with the matte finish of the surrounding covers.
Manufacturing & Optical Deficiencies: The vinyl approach suffered from poor quality and tolerance control. When the LEDs were activated, it caused severe light bleed, resulting in a blurred and distorted mouth HRI display.
Defining the Constraints
The task was not to redesign the head from scratch, but to save the design integrity within rigid, pre-existing boundaries. The team faced a series of strict constraints:
Zero Structural Changes: The underlying mechanical architecture, mounting brackets, and primary internal component layout were completely frozen.
Strict Cost Control: Any introduced solution had to remain highly cost-effective regarding parts replacement, tooling modifications, and lead times.
Uncompromising HRI Clarity: The mouth area had to look entirely seamless and clean ("hidden-until-lit") when idle, yet transmit crisp, high-contrast light without bleeding when active.
Google Partnership & The JTS Effort

The Strategic Partnership
With Apptronik officially partnering with Google DeepMind, the program gained massive industry visibility. The collaboration combined world-class AI foundation models with our cutting-edge humanoid hardware, aiming to advance autonomous reasoning and physical capability in real-world environments.
Google DeepMind’s advanced robotics models required a physical vessel that felt equally sophisticated. The robot's face was no longer just an aesthetic shell; it was the primary interface for demonstrating real-time AI reasoning, making visual clarity and physical execution paramount. Click to learn more about Gemini Robotics.
Collaborative JTS Effort — The Ask Behind Mouth HRI
To mark this milestone, the teams prepared for a Joint Technology Showcase (JTS) - a high-stakes live demonstration that would pull global focus. The explicit mandate for this showcase was a flawless, premium mouth HRI that could clearly communicate the robot's cognitive states.
The success of the JTS relied entirely on a highly optimized faceplate design. It required perfect alignment across ID, CMF, and engineering - an interface that remained completely clean and premium under intense media lighting, yet delivered sharp, high-contrast mouth LED patterns to prove the efficacy of the joint technology effort.
The Mouth HRI Development

>
>

Initial Round Functional Direction
Initial Round Expressive Direction
From Apollo 1 Reference to Expressive Modality
Building upon the interaction legacy of Apollo 1, the initial design phase explored a clear fork between a purely functional, icon-based interface and a more organic, expressive direction. The goal was to establish how the faceplate could dynamically communicate complex AI states without overwhelming the user. Following thorough user-experience reviews, the team pivoted toward an expressive, abstraction-based modality. This chosen path allowed the mouth to shift fluidly between states like listening, reacting, and talking, imbuing the humanoid platform with a more approachable and empathetic character.
Mouth HRI In-Depth Exploration
Translating the expressive direction into physical hardware required an intense study of light behavior and structural boundaries. Using precise CAD iterations, I conducted an in-depth optical matrix exploration to evaluate how different LED light distributions, pocket depths, and diffusion angles affected the mouth icon's clarity. This step was crucial for mapping out the precise real estate required for the internal electronics, ensuring that the visual interface remained completely invisible when turned off, yet emerged with uniform luminosity when active.
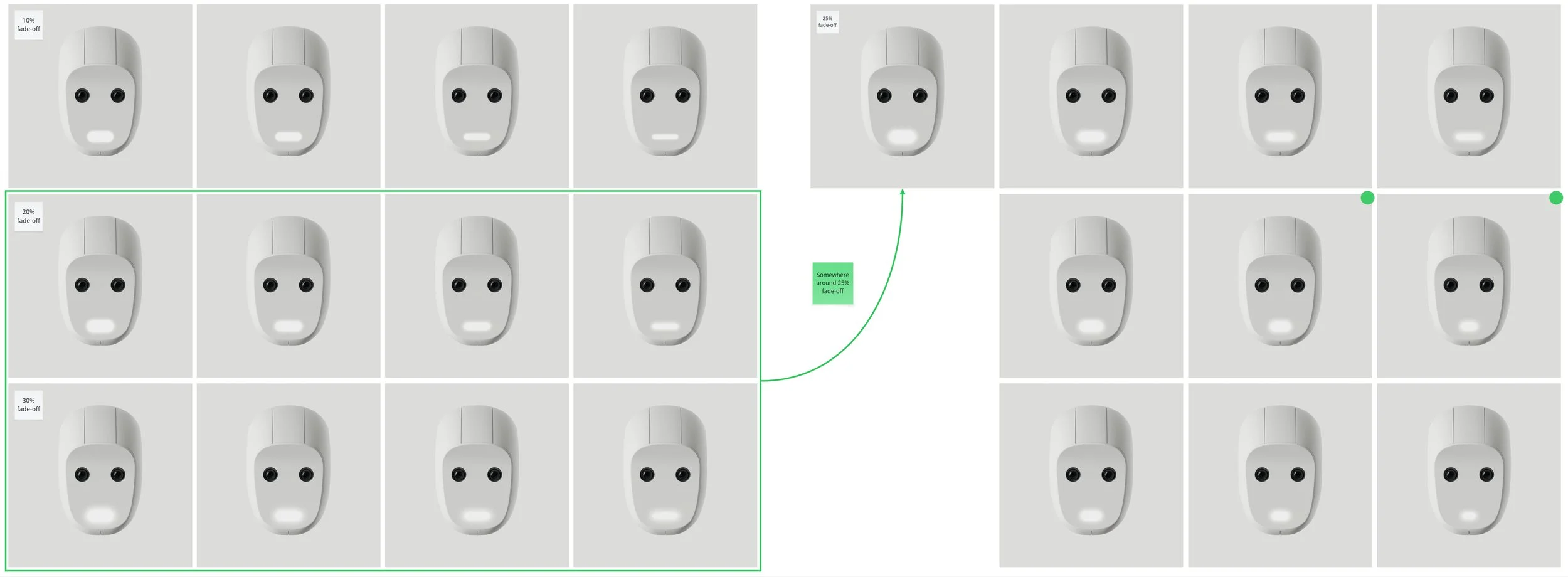
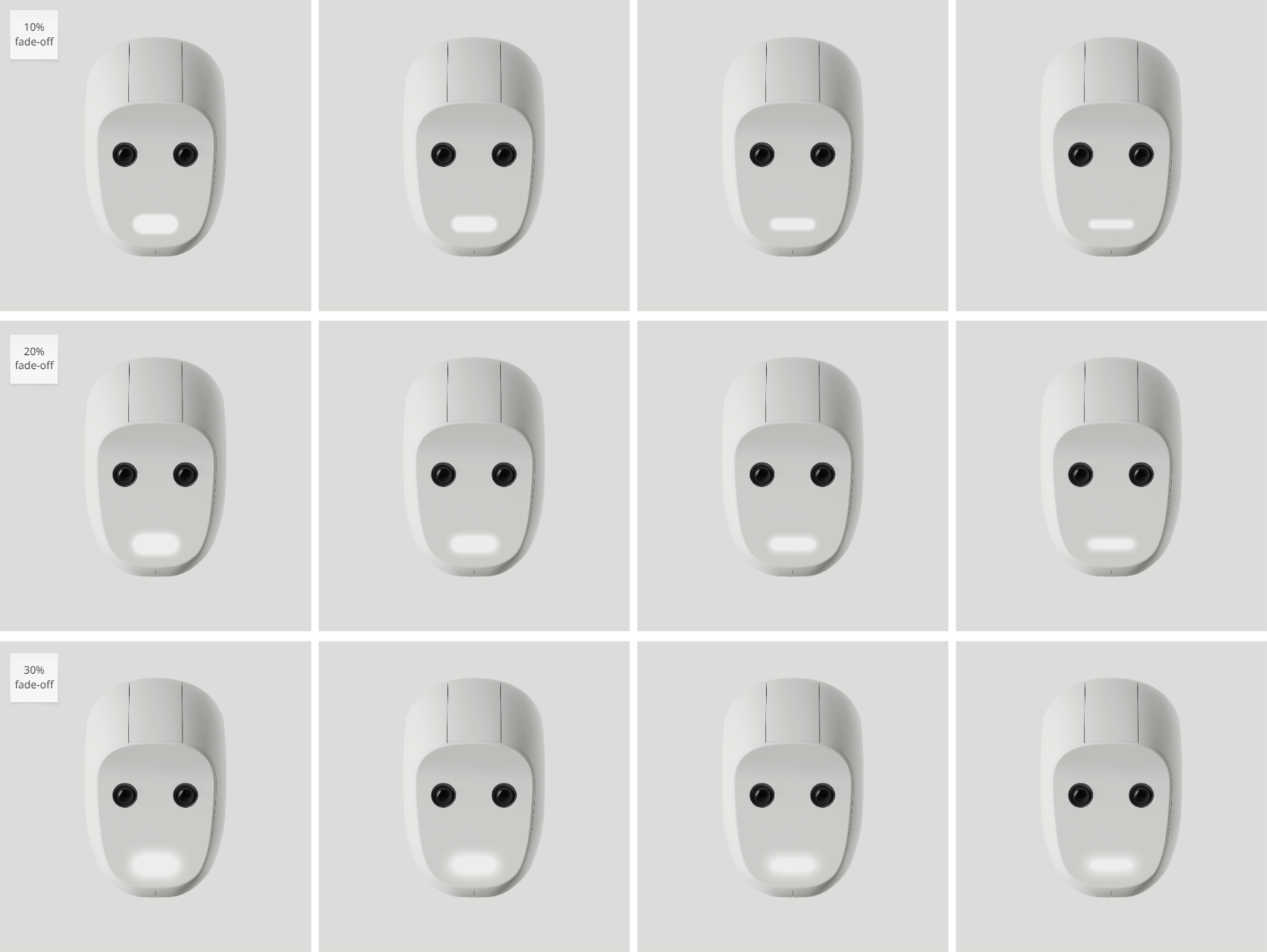
HRI Refinement & Limit Definition
The final step in the HRI development was defining the absolute manufacturing limits to avoid any visual artifacts during live production. By generating a systematic matrix of varying opacity gradients, fade-offs (ranging from 10% to 30%), and material thicknesses, I mapped out the exact threshold where optimal light transmission intersects with perfect deadfront concealment. This technical study allowed us to lock in a precise 25% fade-off parameter, providing the mechanical engineering team and tooling vendors with definitive boundaries to guarantee flawless quality control on the factory floor.
The Proposed Solution - IMD
IMD (In-Mold Decoration) Benchmarking & Precedents
To break the design deadlock, I introduced In-Mold Decoration (IMD) technology to the cross-functional team as the optimal path forward. Leveraging my extensive mass-production experience from iRobot shipping products, I demonstrated how IMD successfully marries high-end aesthetics with extreme technical utility. The core advantage of IMD is its ability to enable seamless deadfront graphics and light-diffusing layers between a protective film and the injection-molded plastic substrate. This precedent proved we could maintain absolute control over light transmission while seamlessly unifying the faceplate's exterior surface finish.
CMF Harmonization: Utilizing an IMD film process allows us to precisely replicate the micro-texture and matte finish of the surrounding head covers.
Optical Continuity: Trapping the graphic layers inside the tooling ensures a razor-sharp window tolerance, eliminating light bleed and keeping the mouth display completely invisible when idle.






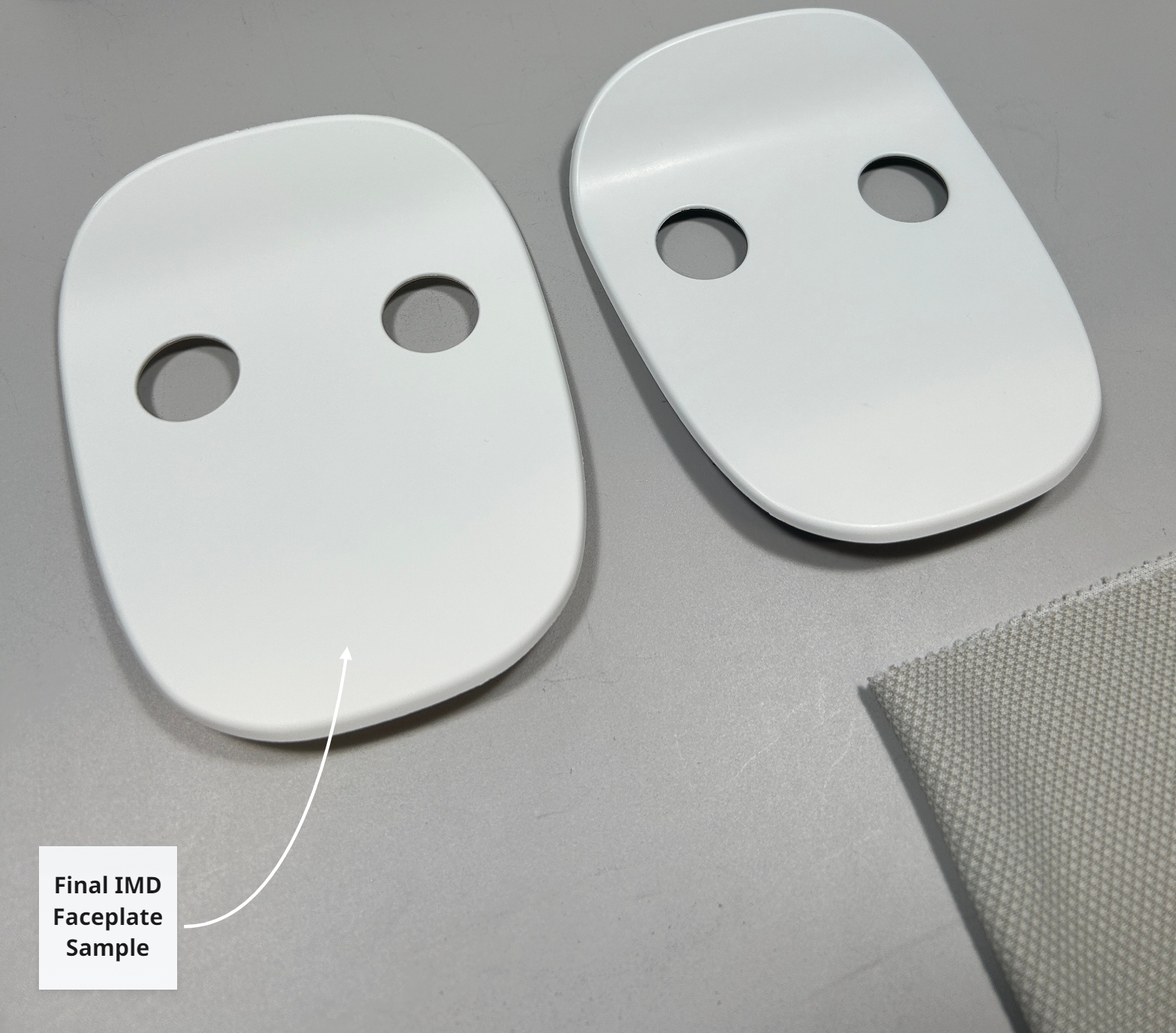
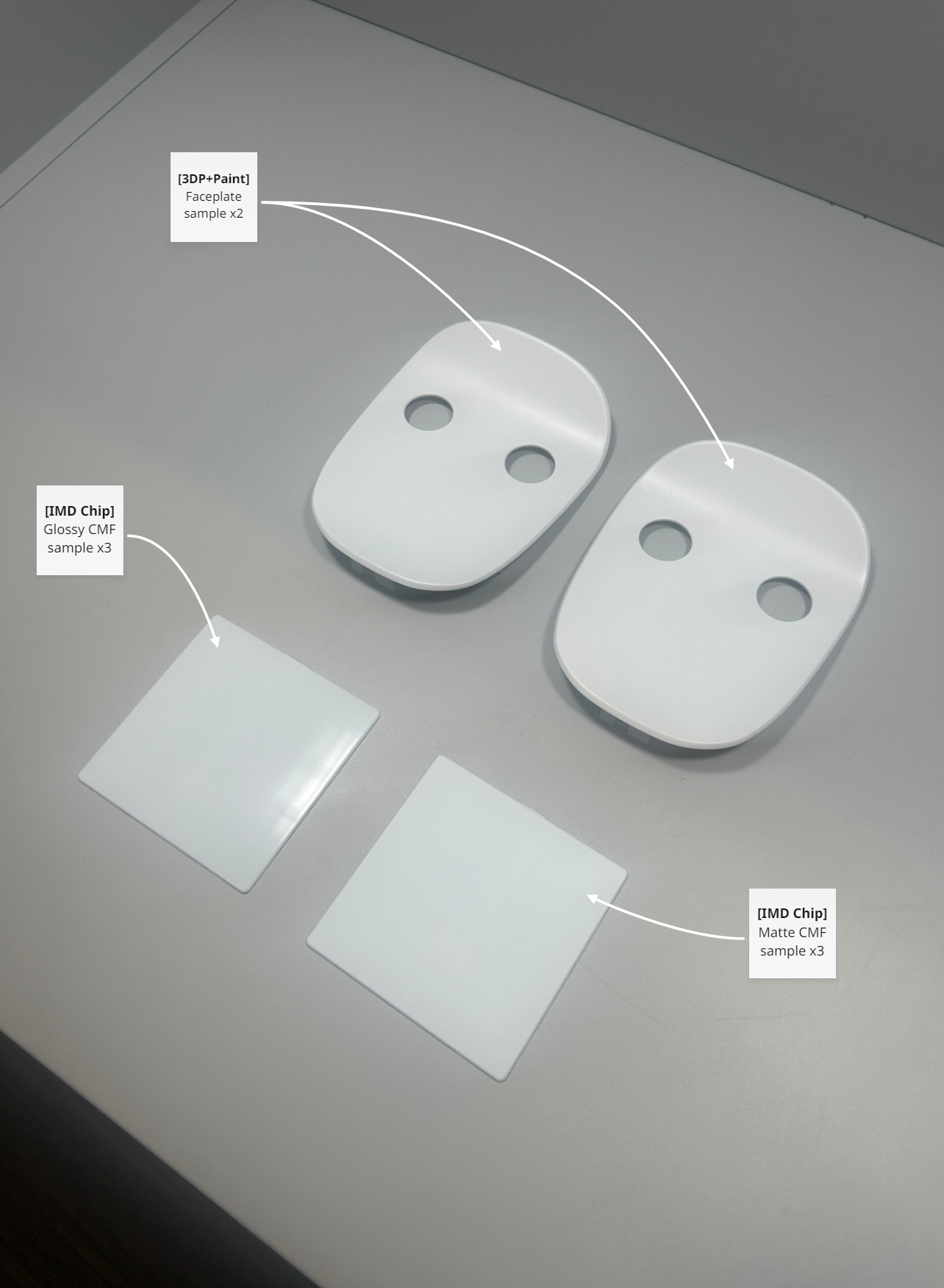
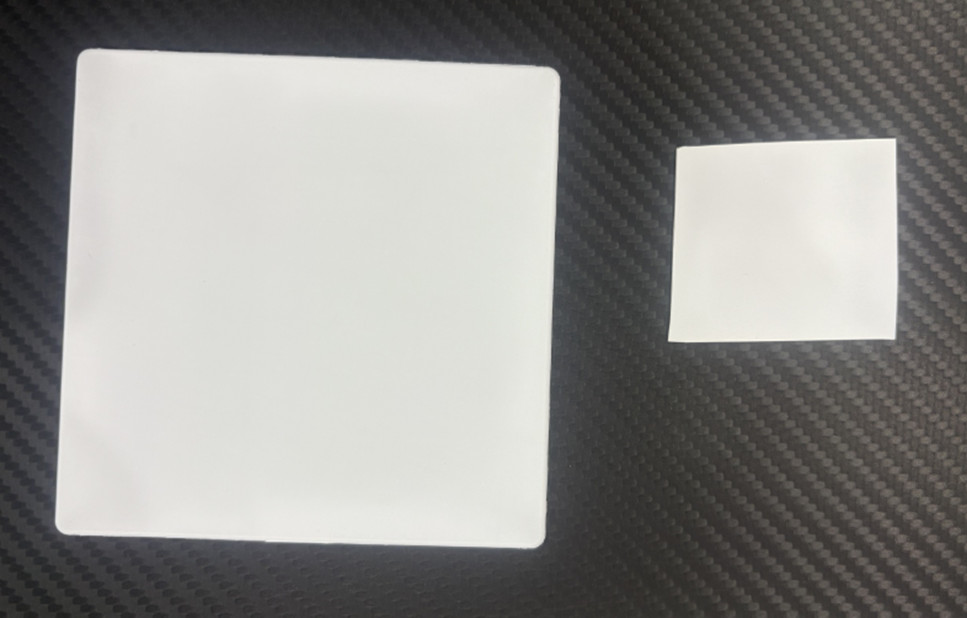
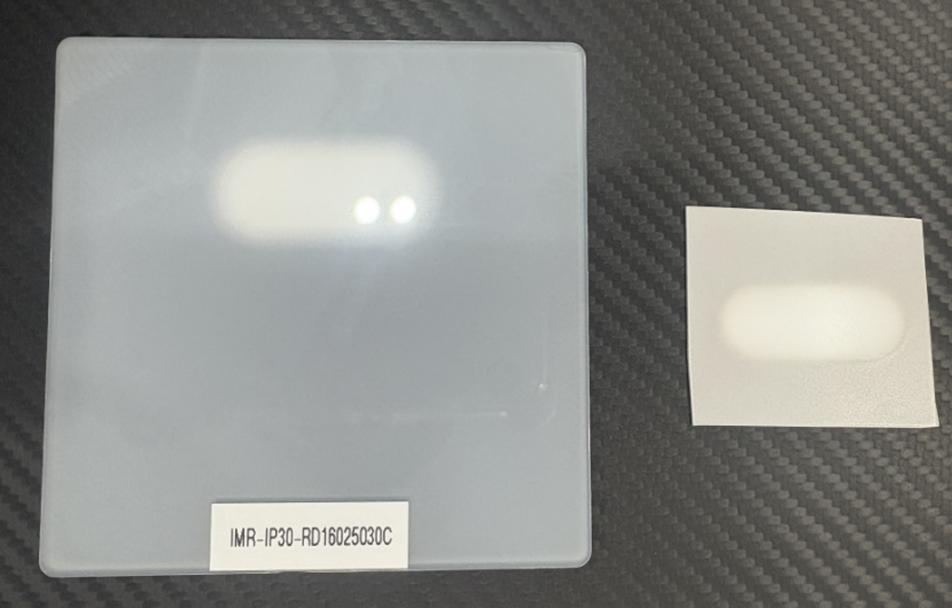
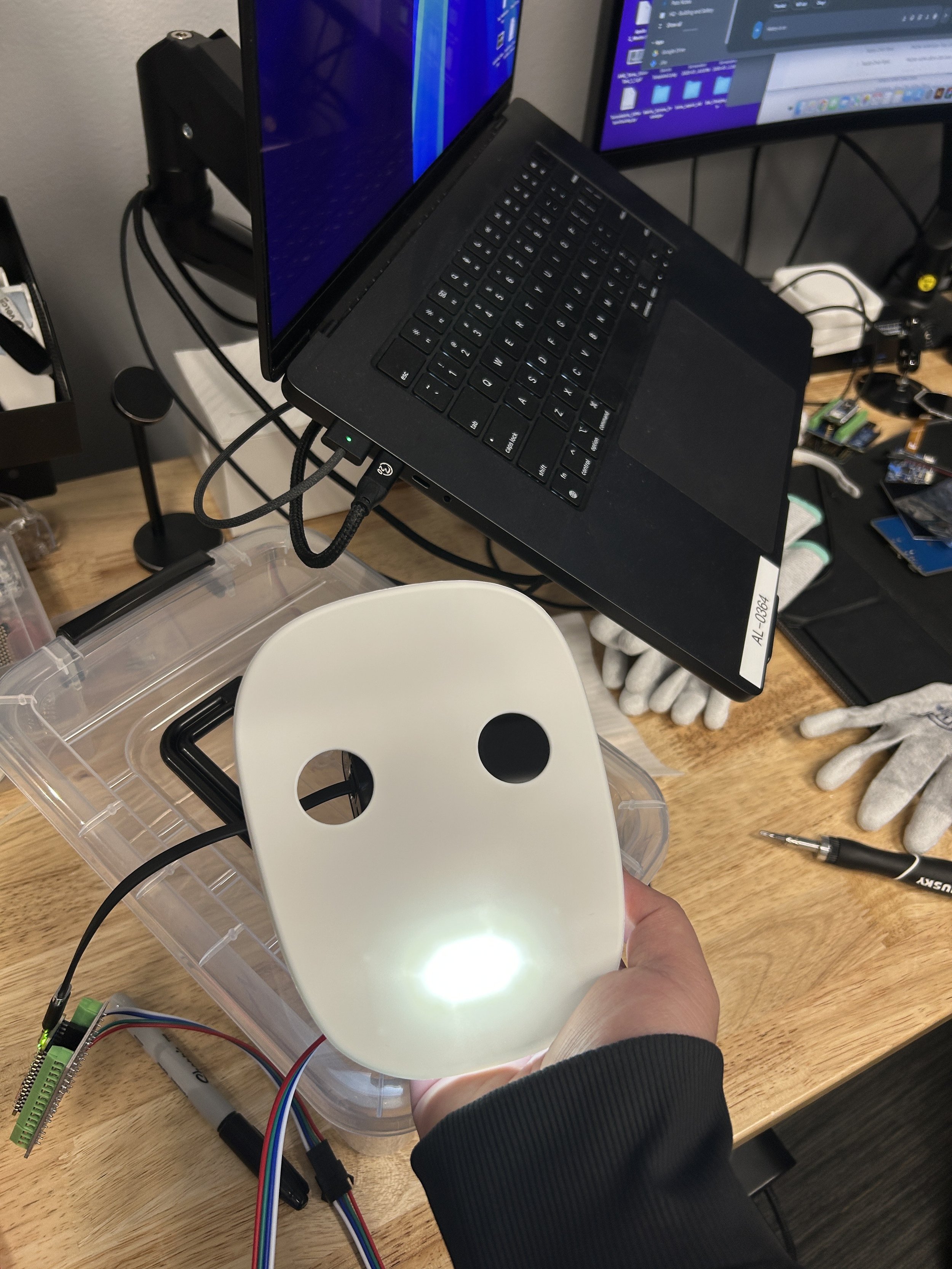
Initial Samples Paving the Way for the Apollo 2 Faceplate Injection Molding Trial
With the technical direction approved, I quickly moved the project into physical validation by developing a series of CMF samples to test the film integration. These early physical prototypes allowed us to evaluate the real-world behavior of the resin injection against the printed deadfront layers. This successful trial provided the definitive proof of concept needed to lock the parameters and release the faceplate for production tooling.
Design Development & Execution


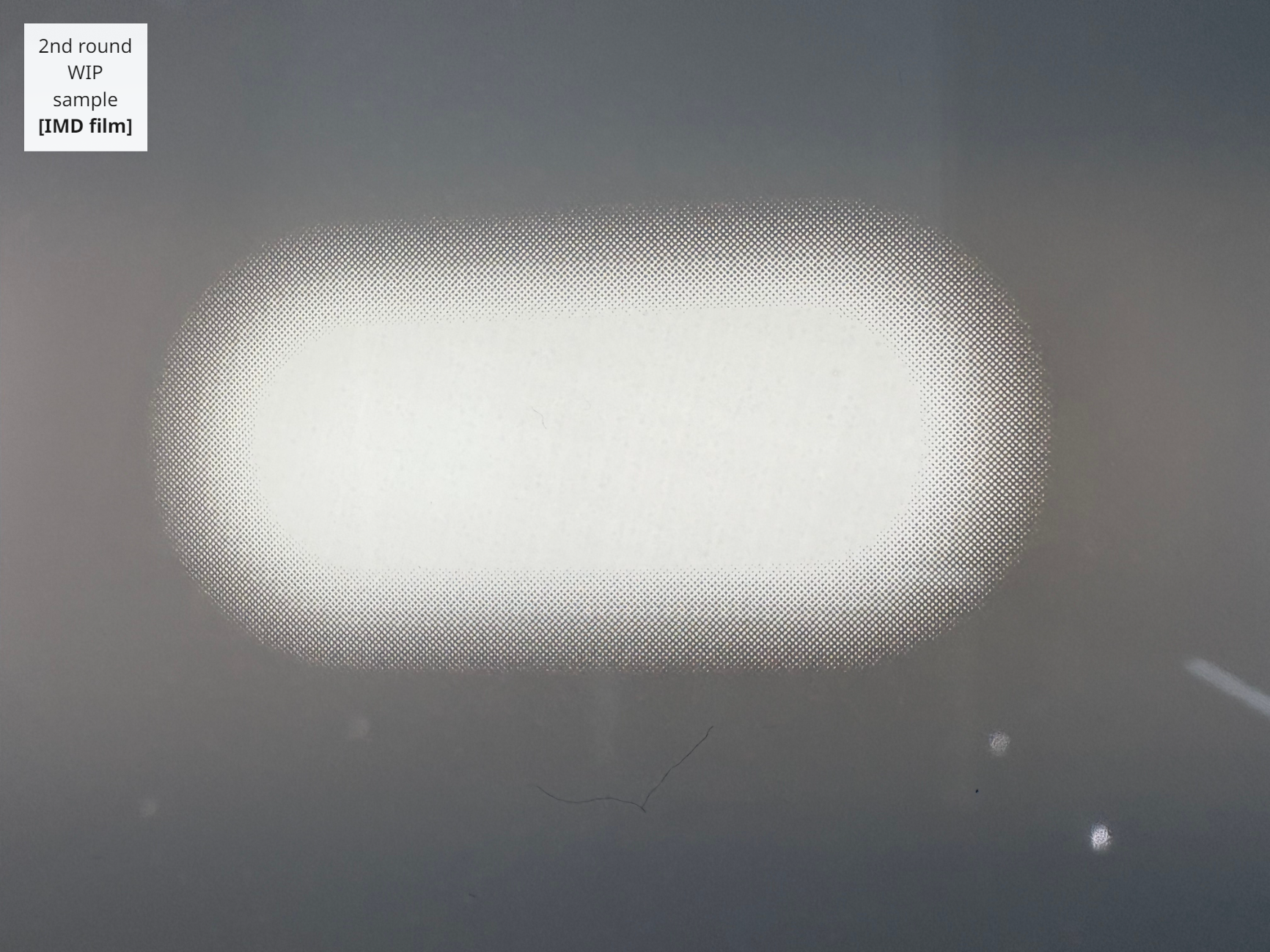
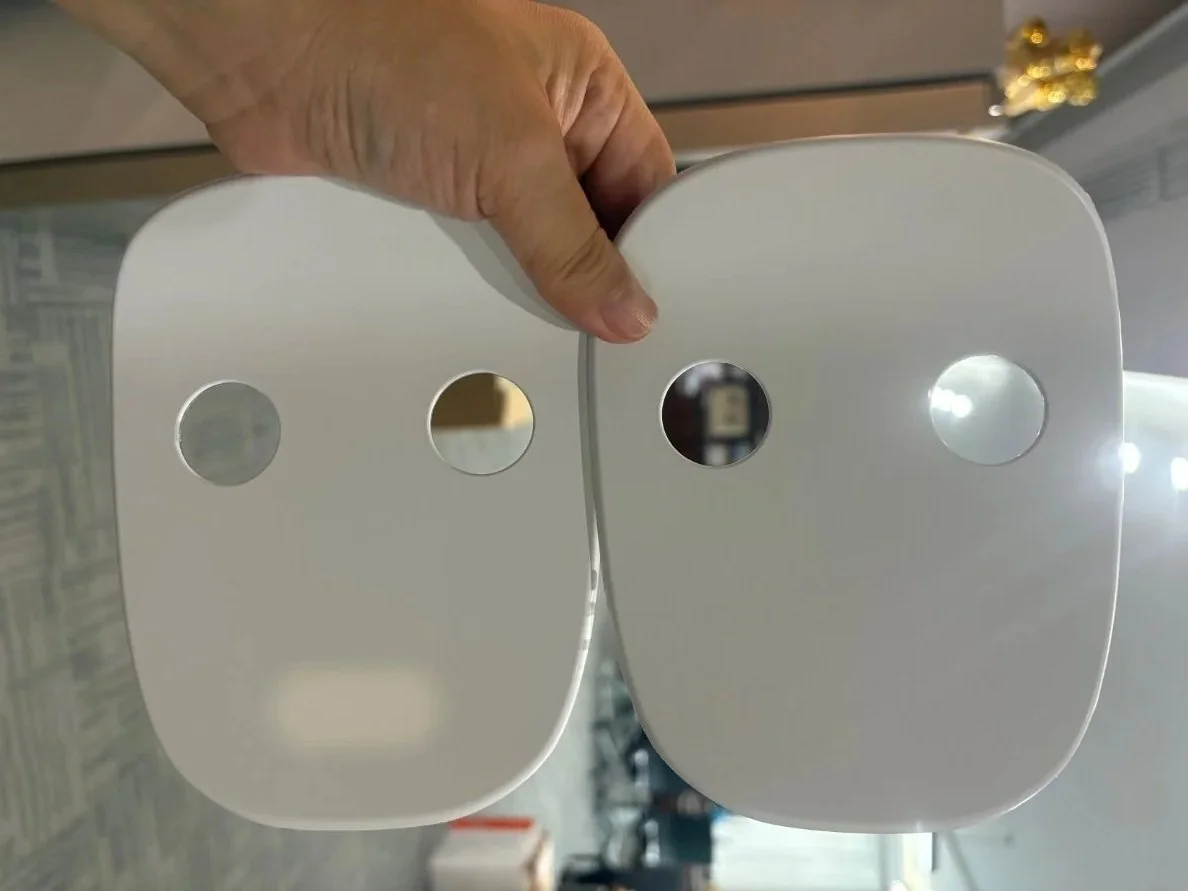
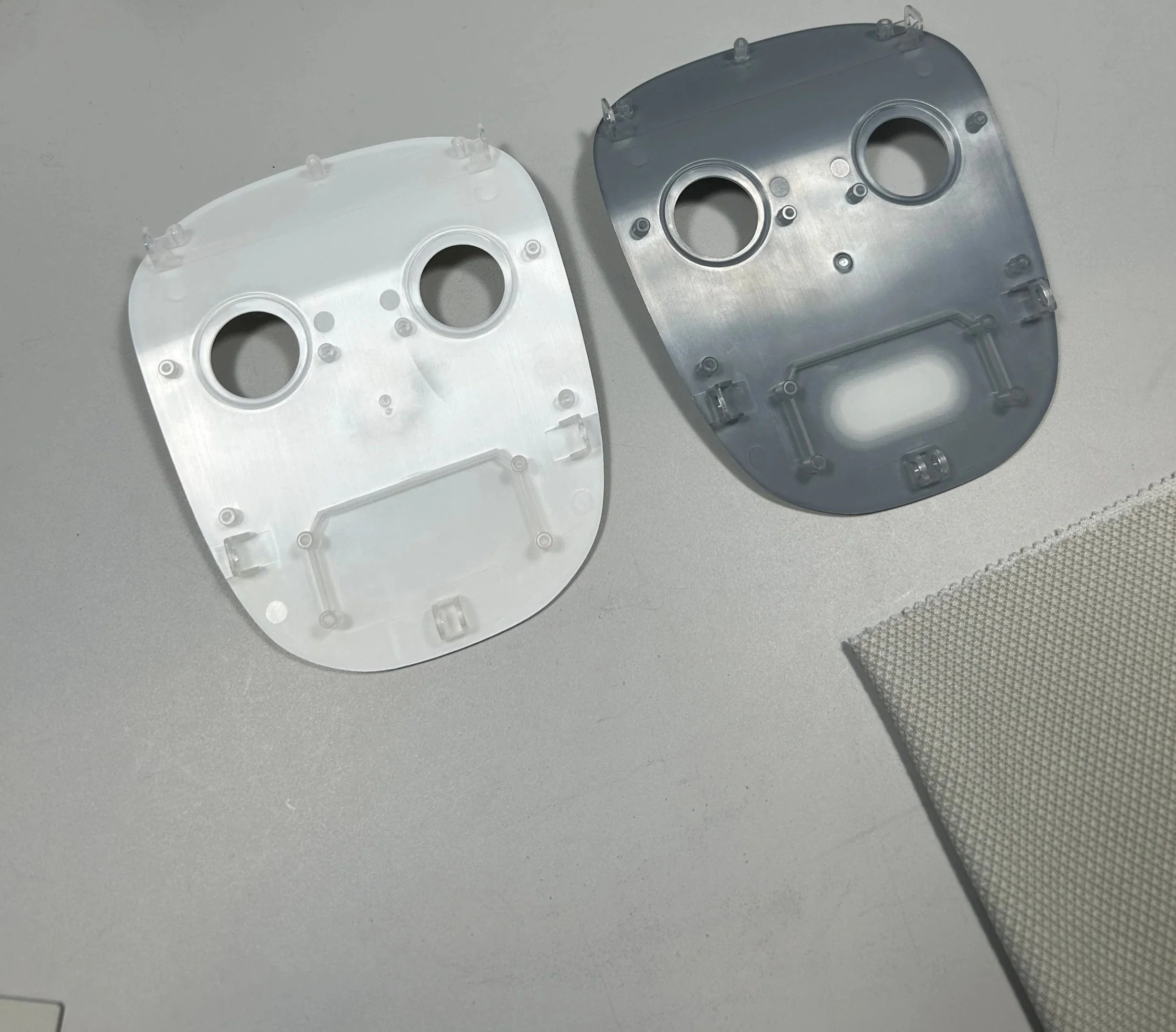
2nd Round CMF Samples Check


6th (Final) Round CMF Samples Check


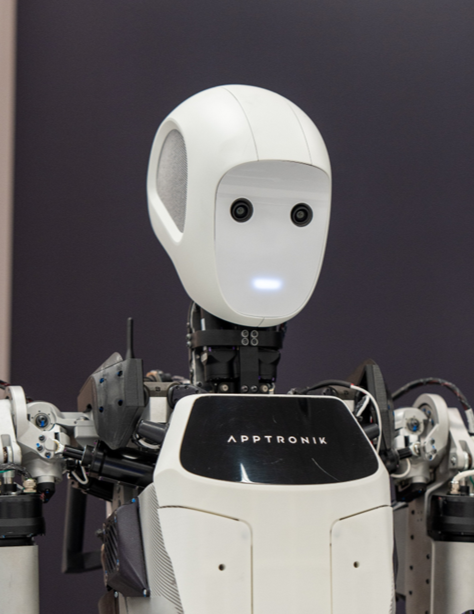
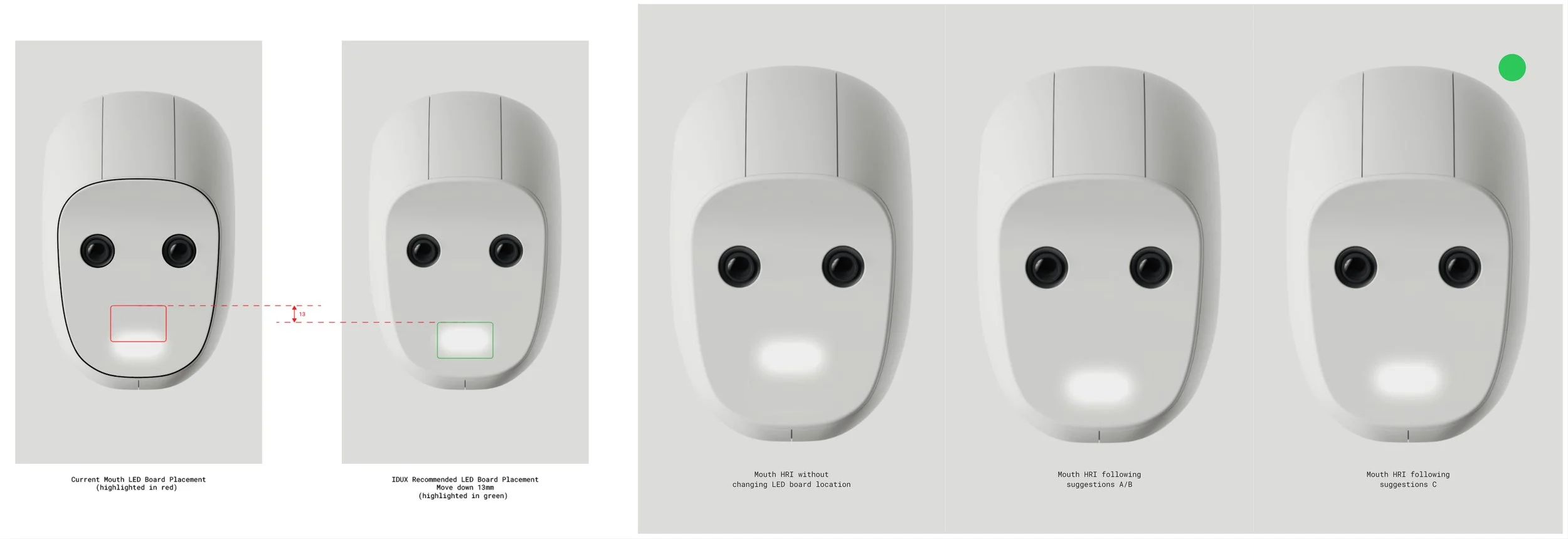
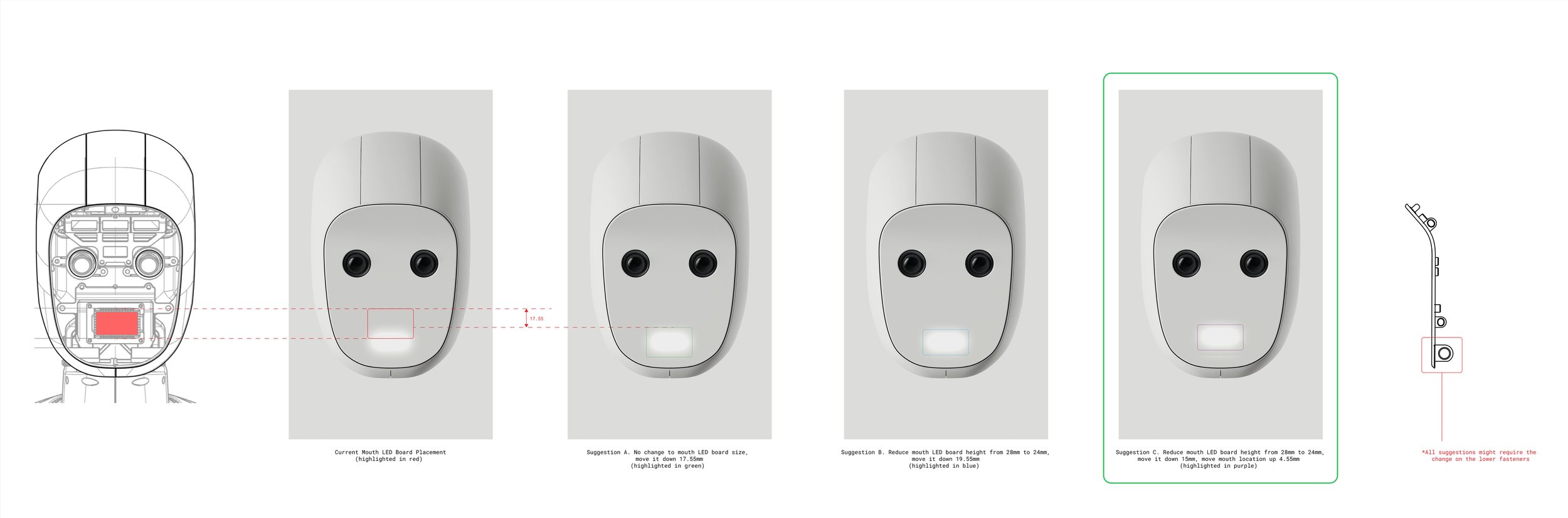
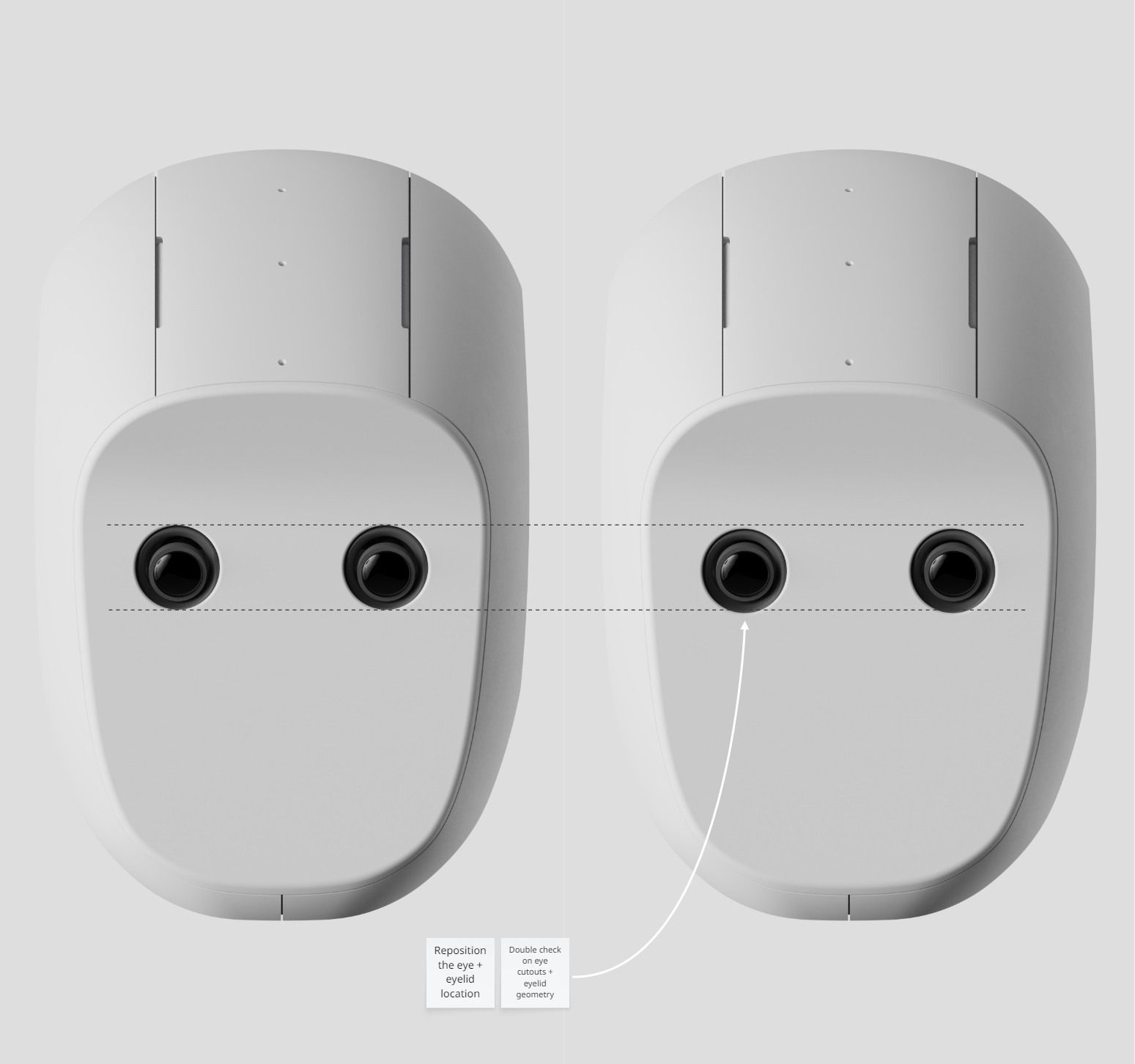
ID Refinement: Faceplate A-Surface Optimization & LED Array Location Calibration
With the IMD manufacturing method chosen, the design process shifted to micro-level A-surface refinement. Because the primary internal packaging was frozen, achieving the desired aesthetic required meticulous geometric adjustments. I led the calibration of the mouth LED driver board location, evaluating shifting array dimensions and heights to optimize light diffusion and display proportions. Concurrently, the eyelid location and surface transitions were fine-tuned, ensuring the faceplate retained a clean, integrated relationship with the surrounding head architecture under all viewing angles.

1st Round CMF Feedback
3rd Round CMF Samples Check & Feedback

4th Round CMF Samples Check & Feedback
5th Round CMF Samples Feedback & Refinement for Final IMD Film
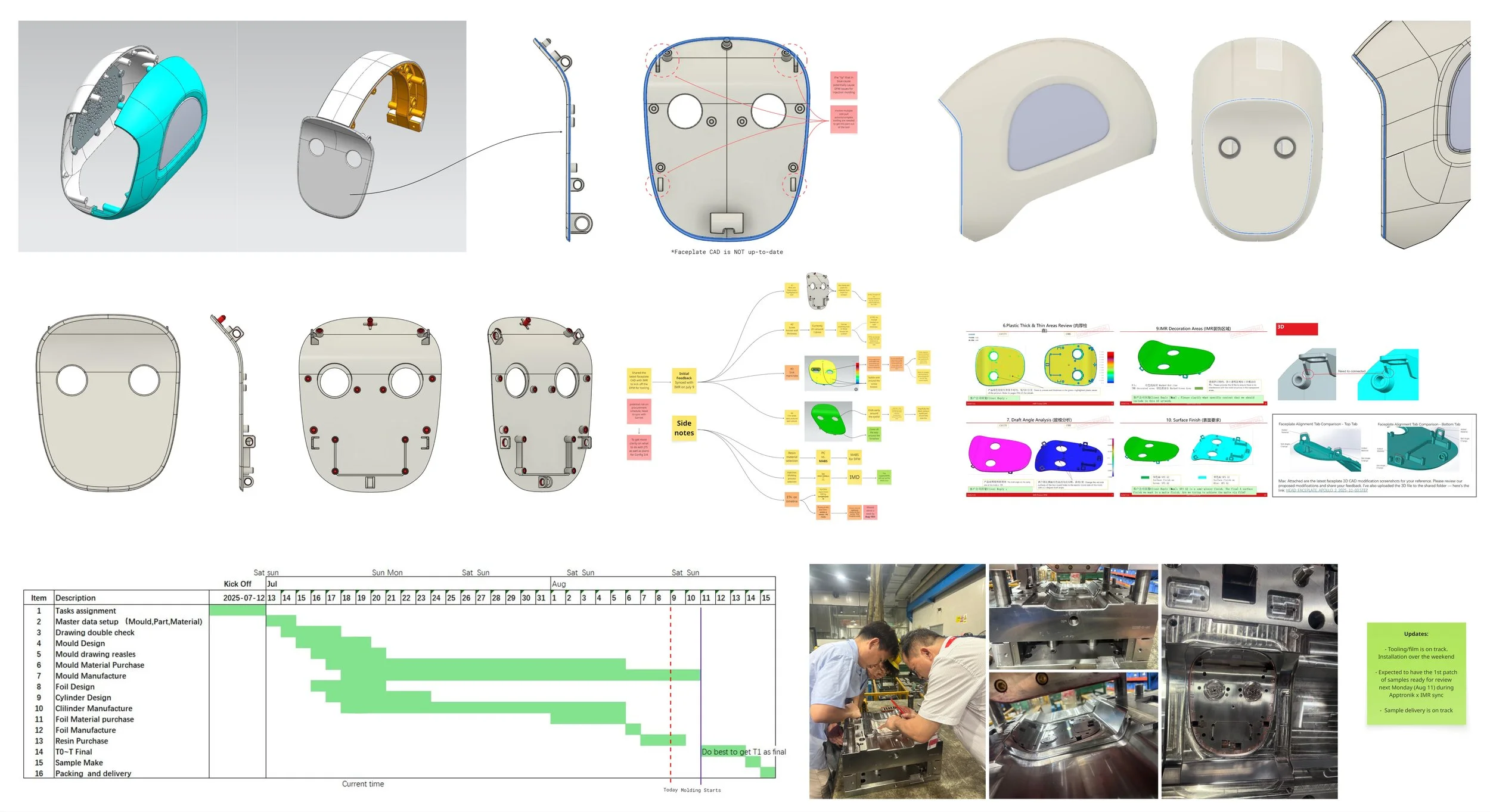



Design for Manufacturing: Leading the Cross-Functional Effort
The final phase of the development was translating the refined ID and CMF data into production tooling. I spearheaded the DFM collaboration between our design team, mechanical engineering, and mold vendors, navigating a strict production schedule toward the T1 sample milestone and JTS filming schedule. This involved a complete review of draft angles, wall thickness consistency, and gate placements via mold flow analysis to ensure the high-pressure resin injection would not deform the film. Through this systematic cross-functional loop, we successfully locked the manufacturing parameters and transitioned Apollo 2 smoothly into mass production.
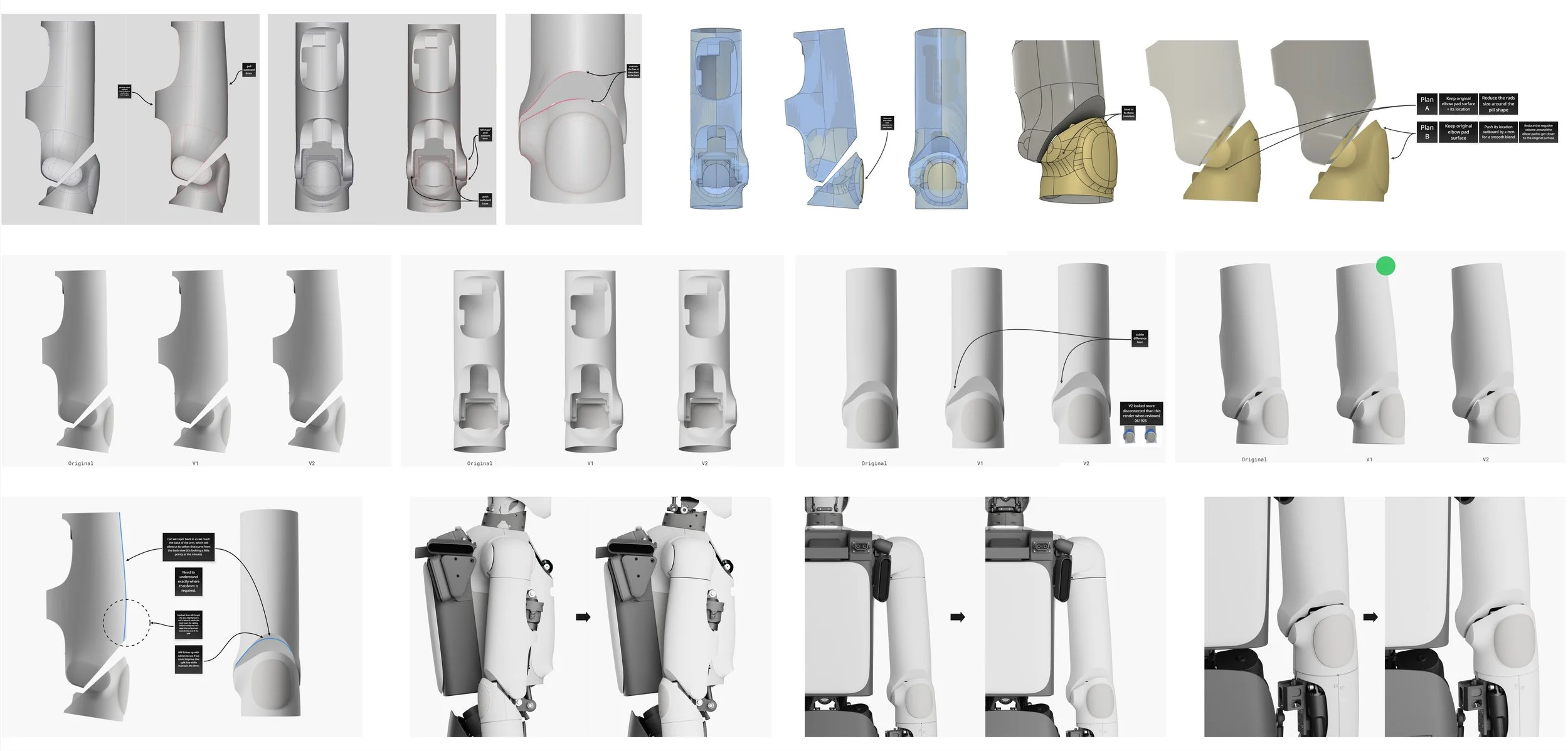
Holistic ID Support on Apollo 2 Platform
Beyond the faceplate architecture, my role extended to supporting the broader execution of the Apollo 2 platform during its final development cycle. Working closely with the other industrial designers and mechanical engineering team, I audited and refined the robot's secondary cosmetic covers, focusing heavily on limb interfaces and dynamic joints. Humanoid ROM introduces complex parting line shifts and potential pinch-points; to counter this, I led iterative CAD studies to optimize component clearances around the elbow and shoulder pivots. By fine-tuning the edge radius and gaps, we eliminated visual clipping during movement, ensuring the robot maintained a cohesive, fluid, and premium aesthetic across its entire range of motion.
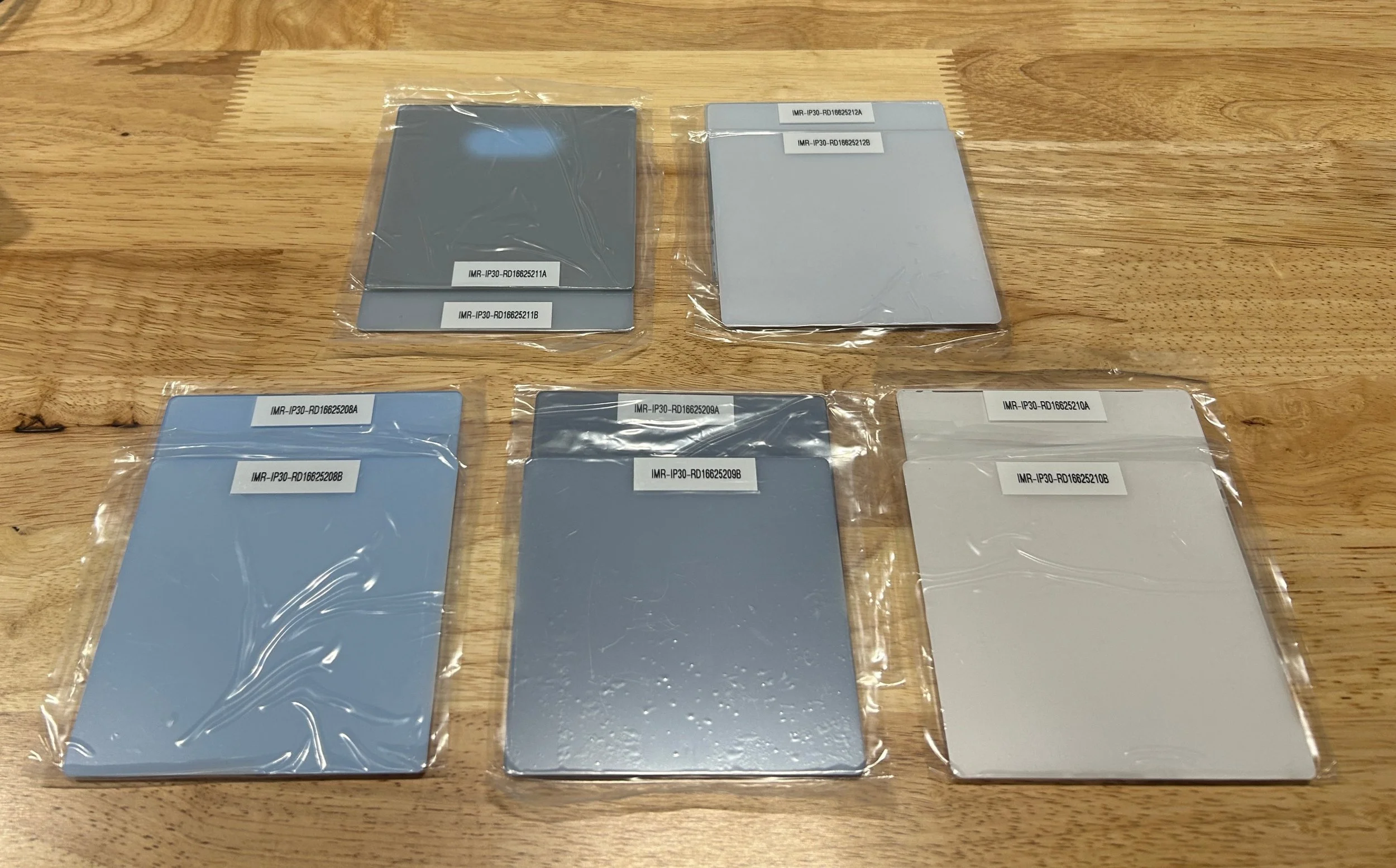
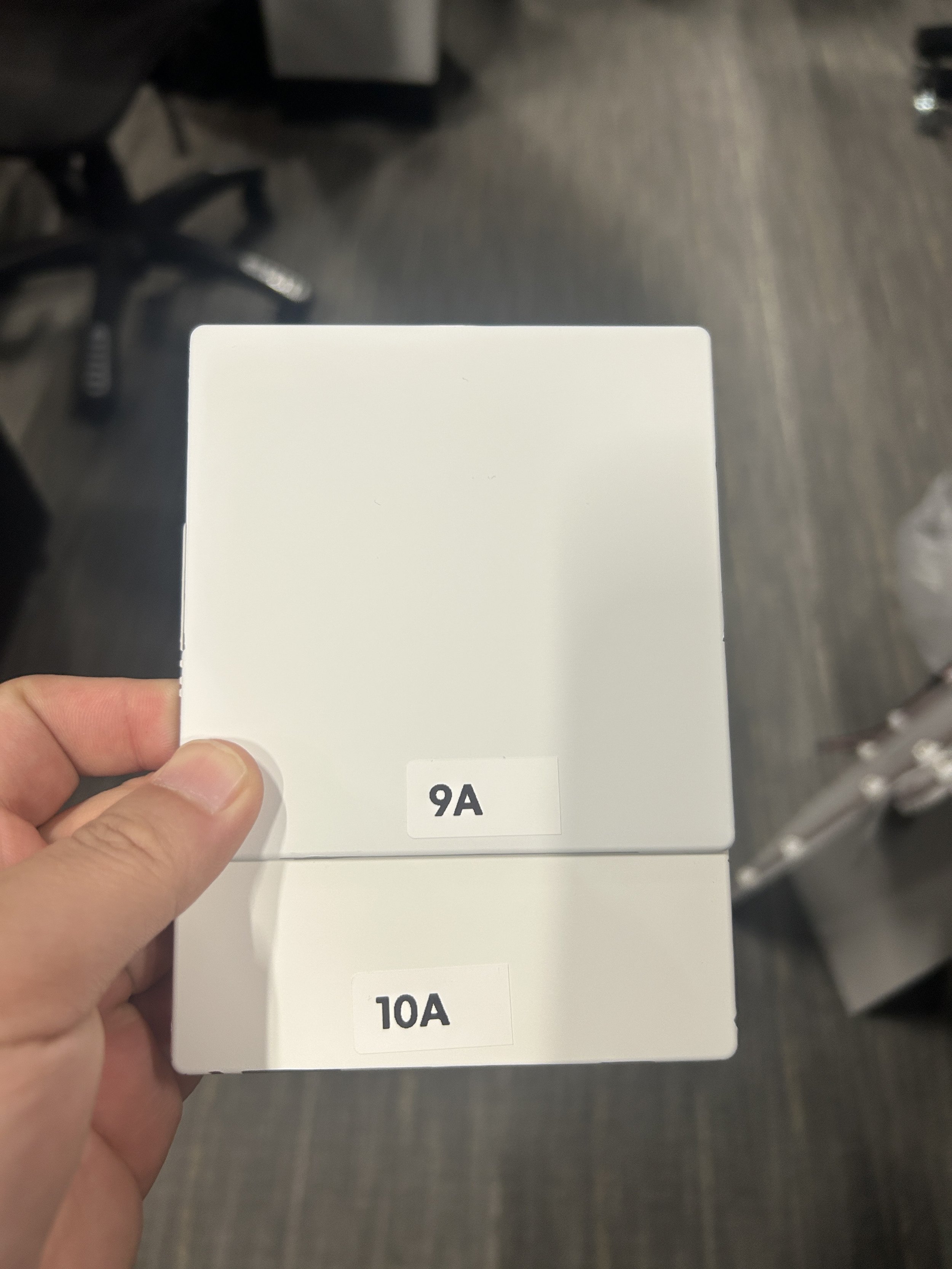
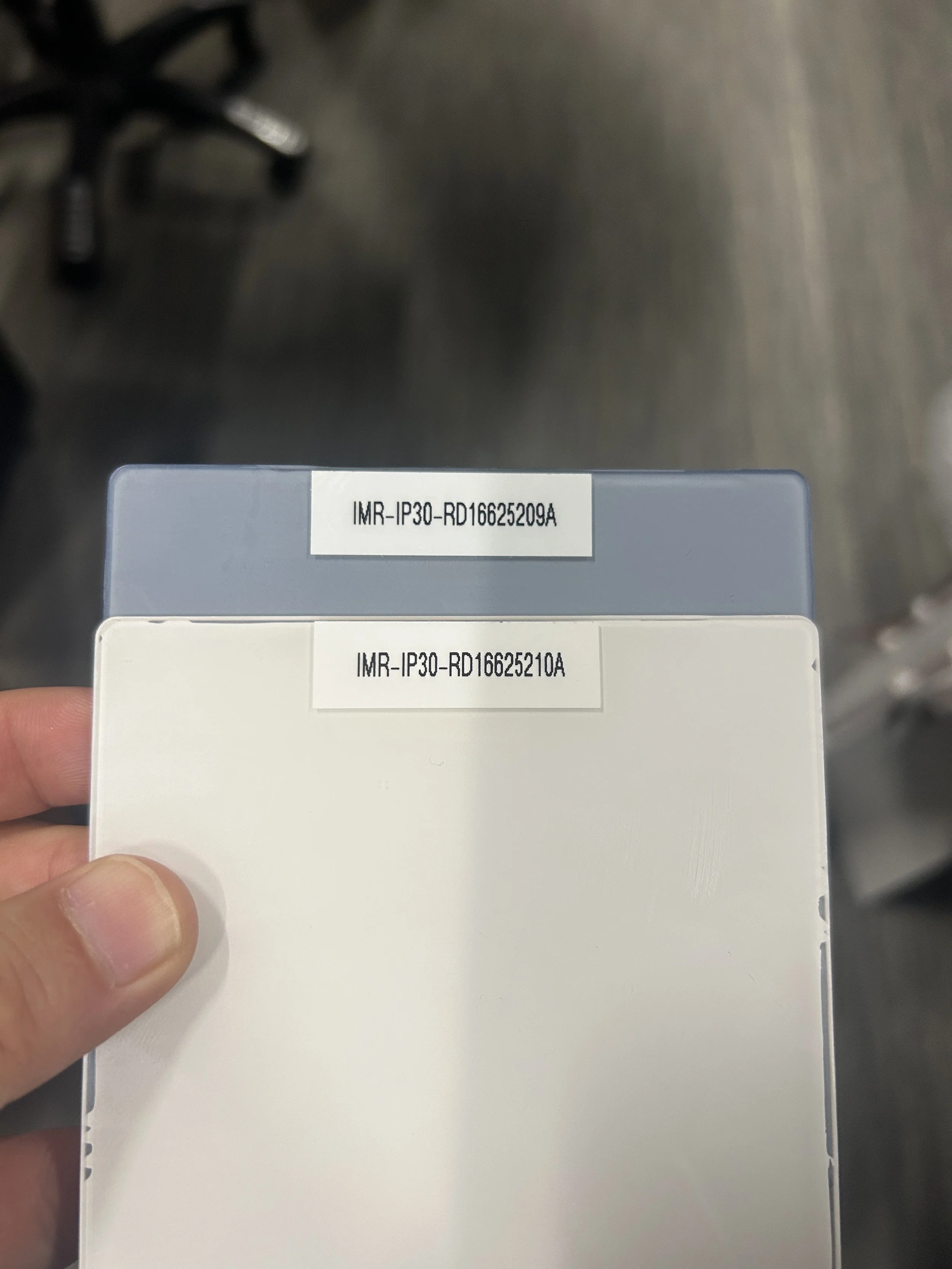
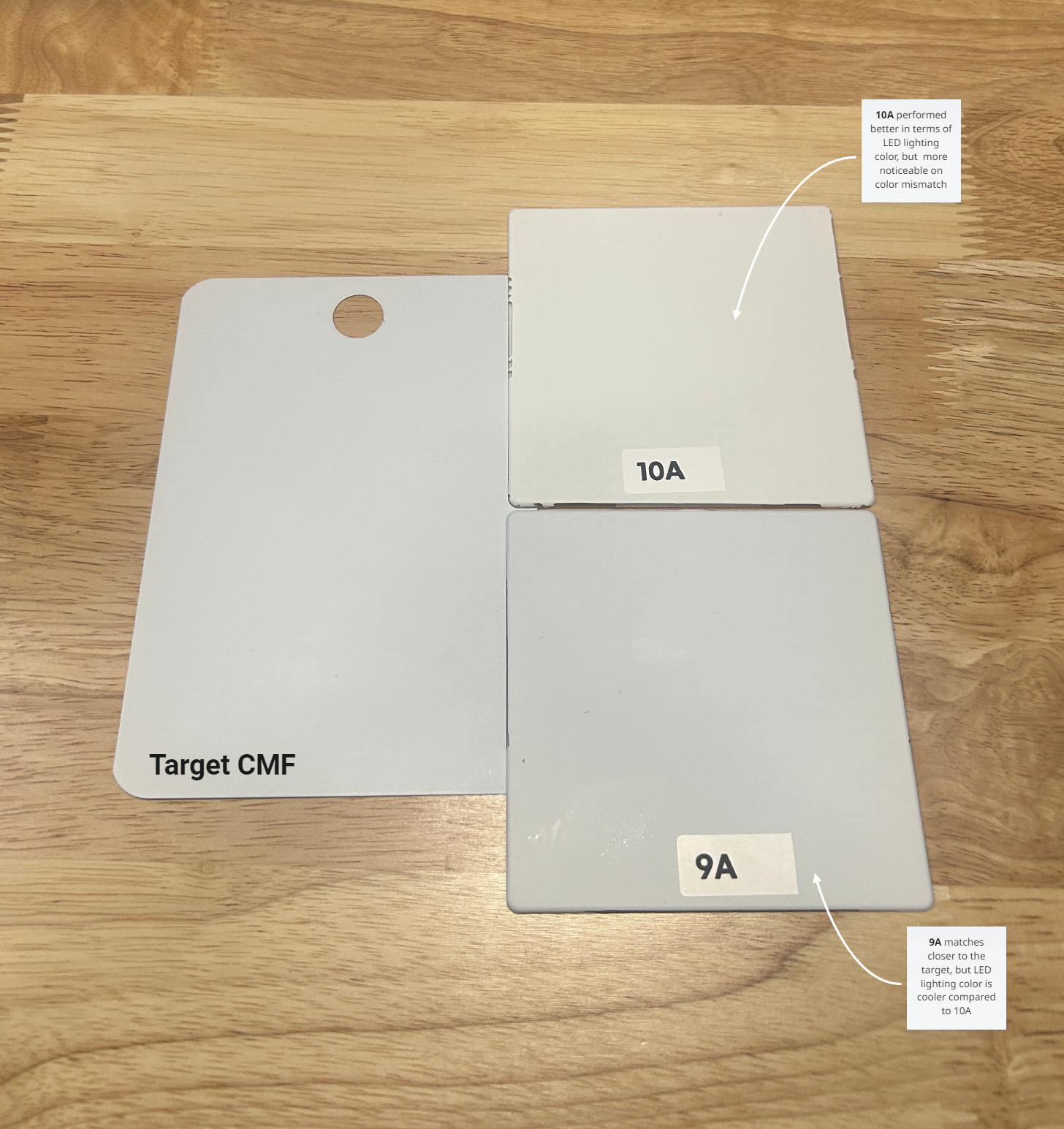
CMF Refinement: Multi-Round Iterations for Production
To bridge the visual gap between the faceplate and the rest of the robot, the CMF development spanned six rigorous rounds of prototyping and testing. Early stages focused on solving material yellowing and evaluating base opacity under direct LED illumination. As the substrate evolved, I worked closely with the CMF designer to utilize precision gloss meters to measure and dial in the target matte finish across multiple IMD film iterations (ranging from sample 9A to 10A). This data-driven loop ensured that the final faceplate sample perfectly matched the CMF, tint, and reflectivity of the surrounding head covers under different lighting conditions.
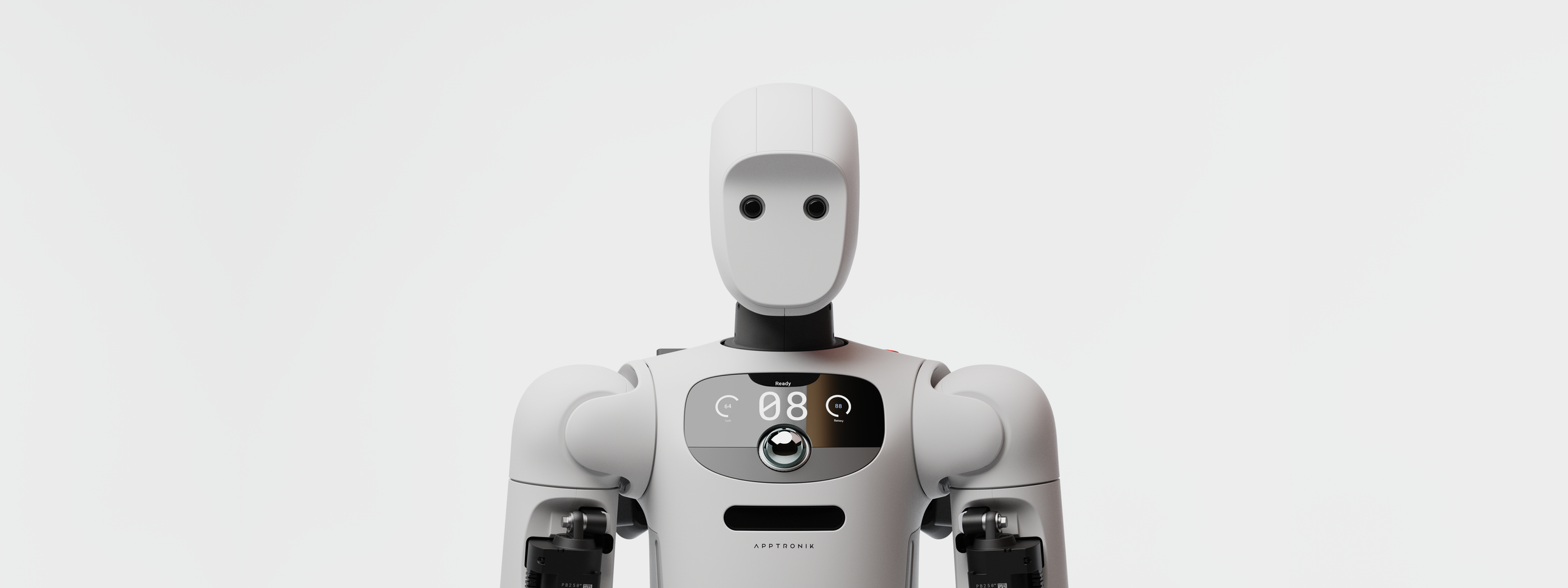
Apollo 2: The Final Design
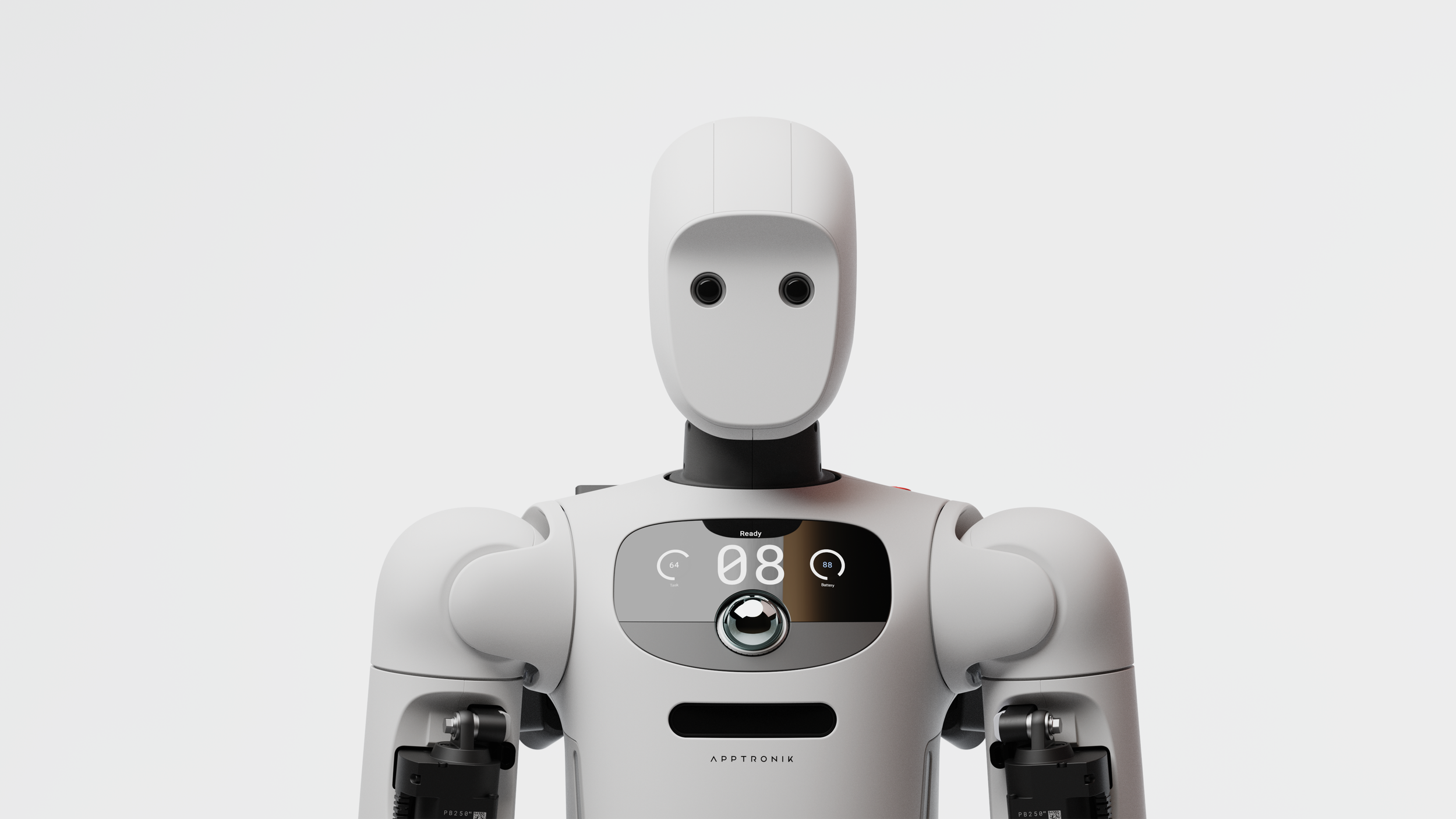
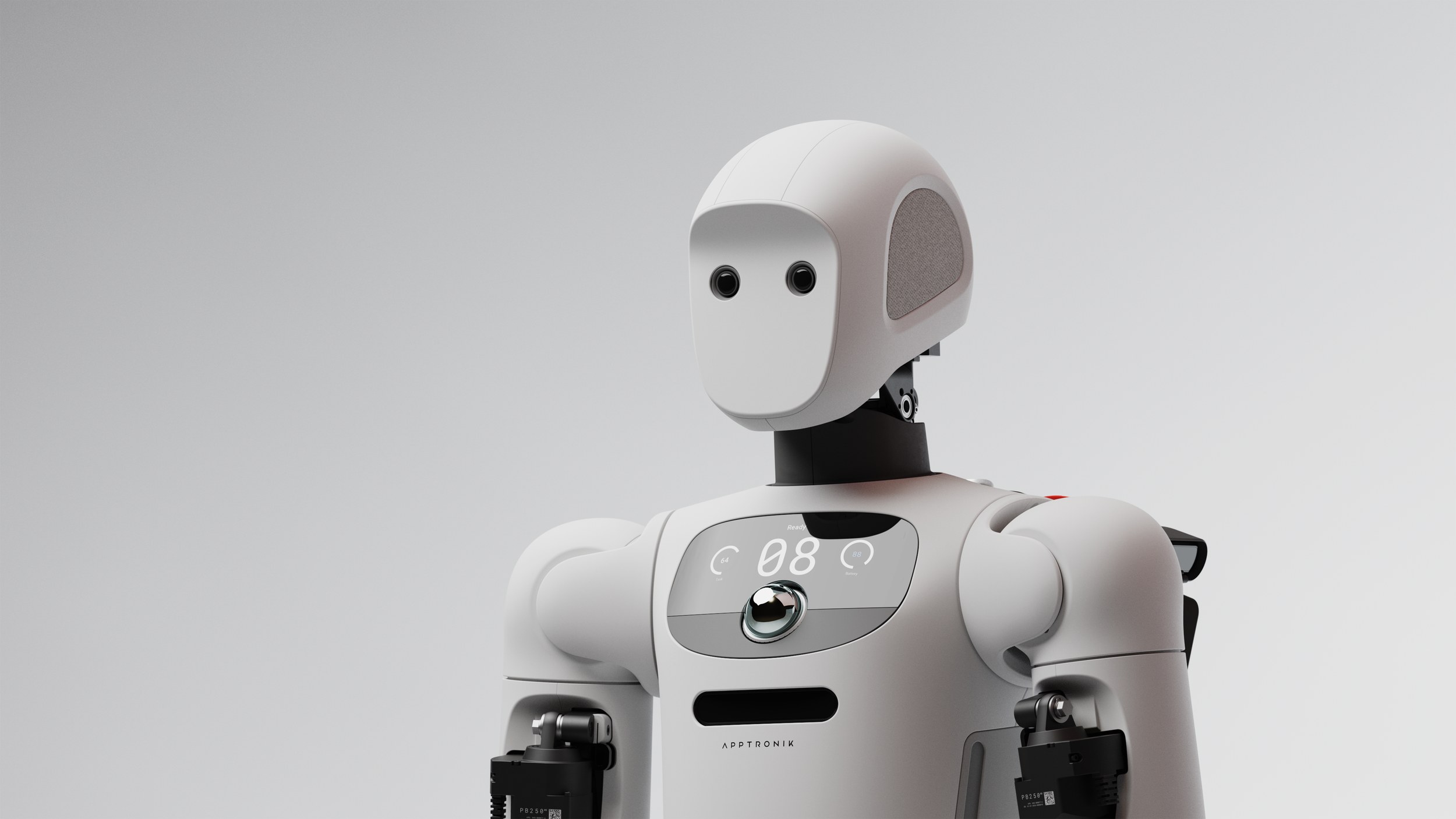



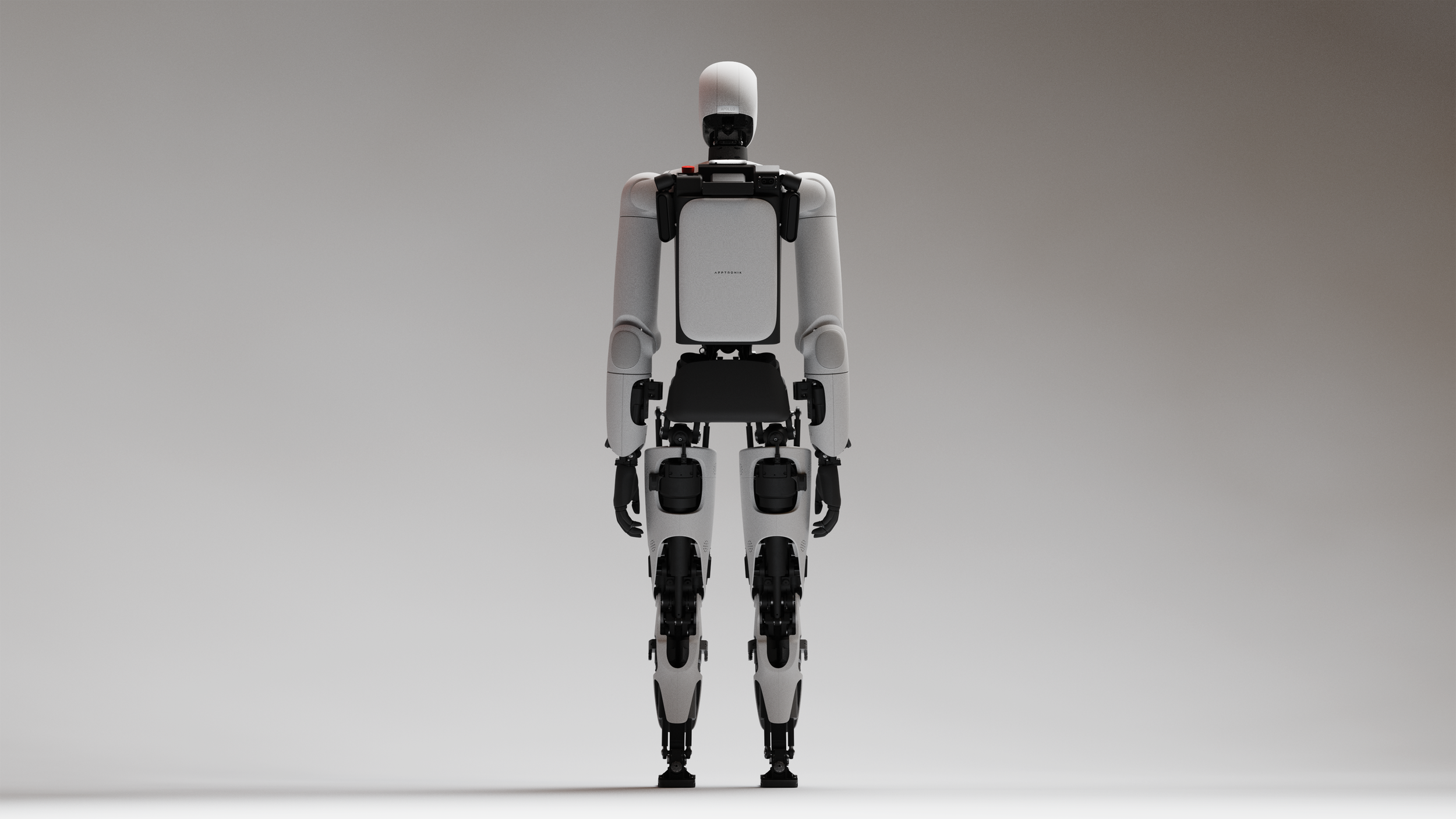


Apollo 2 Debut in June 2026
The final design of Apollo 2 represents a seamless integration of advanced manufacturing technology and premium design execution. Officially launched to the public in June 2026, the updated platform achieves absolute visual harmony, ensuring every parting line, joint clearance, and surface interaction point works together to deliver a cohesive and uncompromising humanoid artifact.
Press Releases

Media & Global Impact
Following its public unveiling in June 2026, Apollo 2 generated significant industry coverage and widespread media attention. Recognized across leading tech publications and robotics forums, the platform's advanced interaction capabilities and refined physical execution were highlighted as a major leap forward for commercial humanoid robotics.
